Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
Symmetry Reasoning for Multi-Agent Path Finding
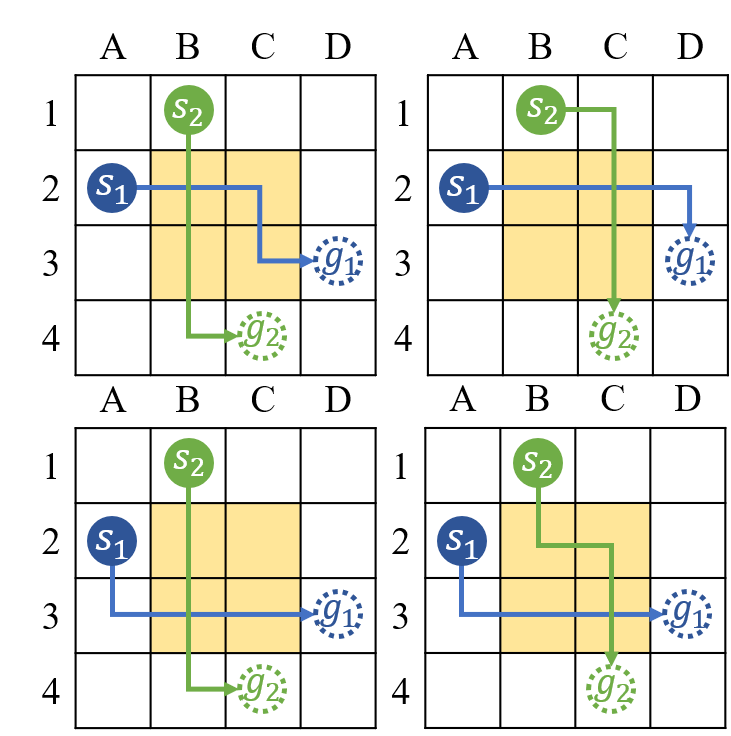
Multi-Agent Path Finding (MAPF) is a challenging combinatorial problem that asks us to plan collision-free paths for team of cooperative agents. One of the reasons MAPF problems are so hard to solve is due to a phenomena called pairwise path symmetry, which occurs when two agents have many equivalent paths, all of which appear promising, but which are pairwise incompatible because they result in a collision. The symmetry arises commonly in practice and can produce an exponential explosion in the space of possible collision resolutions, leading to unacceptable runtimes for currently state-of-the-art MAPF algorithms that employ heuristic search, such as Conflict-based Search (CBS). To break symmetries, we propose a variety of constraint-based reasoning techniques, to detect the symmetries as they arise and to efficiently eliminate, in a single branching step, all permutations of two currently assigned but pairwise incompatible paths.
Relevant publications:
publications
Atzmonaij23
Published in , 1900
Atzmonijcai20
Published in , 1900
Boyarskiijcai20
Published in , 1900
Chanaaai22
Published in , 1900
Chanwomapf20
Published in , 1900
Chenaaai21robust
Published in , 1900
Chenaaai21s2m2
Published in , 1900
Chenaaai24
Published in , 1900
Chensocs22
Published in , 1900
Chongaamas24
Published in , 1900
Eaai20
Published in , 1900
Felnericaps18
Published in , 1900
Fengicaps24
Published in , 1900
Friedrichijcai24
Published in , 1900
Geicaps23
Published in , 1900
Huangaaai22
Published in , 1900
Huangicaps23
Published in , 1900
Jiangaaai25
Published in , 1900
Jiangicra25
Published in , 1900
Jiangsocs24
Published in , 1900
Lamicaps23
Published in , 1900
Laurent21
Published in , 1900
Leetaaai22
Published in , 1900
Liaaai19large
Published in , 1900
Liaaai19symmetry
Published in , 1900
Liaaai21eecbs
Published in , 1900
Liaaai21lifelong
Published in , 1900
Liaaai22
Published in , 1900
Liaaai23
Published in , 1900
Liaamas20
Published in , 1900
Liaiaa19
Published in , 1900
Liaij21
Published in , 1900
Liicaps19disjoint
Published in , 1900
Liicaps19fastmap
Published in , 1900
Liicaps20
Published in , 1900
Liicaps21
Published in , 1900
Liijcai19
Published in , 1900
Liijcai21
Published in , 1900
Efficient and Effective Techniques for Large-Scale Multi-Agent Path Finding
Published in , 1900
Liuaamas19
Published in , 1900
Maaaai19
Published in , 1900
Maaamas17
Published in , 1900
Maijcai18
Published in , 1900
Qianaaai25
Published in , 1900
Renicaps23
Published in , 1900
Shaoulicaps24
Published in , 1900
Shaouliclr25
Published in , 1900
Shaoulsocs24
Published in , 1900
Shenicaps23
Published in , 1900
Sternsocs19
Published in , 1900
Suaaai24
Published in , 1900
Surynekprima20
Published in , 1900
Tangmrs23
Published in , 1900
Tangsocs24
Published in , 1900
Varamballysocs22
Published in , 1900
Veerapaneniaaai25
Published in , 1900
Veerapaneniicaps24
Published in , 1900
Veerapaneniicra25
Published in , 1900
Walkericaps21
Published in , 1900
Wangaaai25
Published in , 1900
Wangaamas19
Published in , 1900
Wangicaps24mapf3d
Published in , 1900
Wangicaps24momapf
Published in , 1900
Xuiros22
Published in , 1900
Yanaaai25
Published in , 1900
Yanral24
Published in , 1900
Zangaaai25
Published in , 1900
Zhangaamass22
Published in , 1900
Zhangaij22
Published in , 1900
Zhangar23
Published in , 1900
Zhangcase22
Published in , 1900
Zhanghplan21
Published in , 1900
Zhangicaps20
Published in , 1900
Zhangijcai23
Published in , 1900
Zhangijcai24
Published in , 1900
Zhangneurips23
Published in , 1900
Zhangsocs22
Published in , 1900
Zhangsocs22mutex
Published in , 1900
Zhongicra22
Published in , 1900
talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
Teaching experience 2
Workshop, Carnegie Mellon University, Robotics Institute, 2015
This is a description of a teaching experience. You can use markdown like any other post.
16642: Manipulation, Estimation, and Control
, , 1900
Robotics Institute, Carnegie Mellon University, Fall 2023
16891: Multi-Robot Planning and Coordination
, , 1900
Robotics Institute, Carnegie Mellon University, Spring 2023
16642: Manipulation, Estimation, and Control
, , 1900
Robotics Institute, Carnegie Mellon University, Fall 2024
16642: Manipulation, Estimation, and Control
, , 1900
Robotics Institute, Carnegie Mellon University, Fall 2025